SERWOMECHANIZM
Zalety serwomotoru:
1) Duża mocy wyjściowa w odniesieniu do wymiarów/wagi silnika
2) Enkoder zapewnia wymaganą dokładność/rozdzielczość
3) Duża sprawność, przy małych obciążeniach dochodzi do 90%
4) Duża moc, możliwość osiągania dużych przyśpieszeń
5) Posiada "zapas" mocy. W krótkim okresie czasu możliwe 2-3 krotne przeciążenie
6) Posiada "zapas" siły. W krótkim okresie czasu możliwy wzrost 5-10 krotny.
7) Motor się nie grzeje. Prąd proporcjonalny do obciążenia
8) Bardzo dobry wskaźnik prędkość/siła
9) Cicha praca przy dużych prędkościach
10) Brak rezonansów i wibracji
Serwomechanizm to zamknięty układ sterowania (układ automatyki, układ regulacji) ze sprzężeniem zwrotnym, w którym sygnałem wyjściowym jest jakaś dana, taka jak położenie, prędkość czy przyśpieszenie. Często jest to po prostu przesunięcie.
Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem wyjściowym i powstały w ten sposób uchyb podawany jest na człon korekcyjny, a dalej na wzmacniacz. Wzmocniony sygnał trafia do siłownika (może być to odpowiedni silnik elektryczny – ang. servomotor), którego przemieszczenie jest wartością wyjściową układu. Zadaniem serwomechanizmu jest likwidacja błędów regulacji (uchybu przemieszczenia), powstających na skutek zmian wielkości wzorcowej, a więc klasyfikujemy go jako układ nadążny. Serwomechanizm ma strukturę typowego układu regulacji, nie steruje jednak obiektem technologicznym, lecz siłownikiem w celu usprawnienia działania toru wykonawczego.
Specyfiką serwomechanizmów jest całkujący charakter siłownika o dynamice nie utrudniającej regulacji, ale wnoszącej nieliniowość. Zmusza to do stosowania korektorów proporcjonalnych (regulator P), o dużym wzmocnieniu, a nawet wzmacniaczy trójpołożeniowych.
Całkujący charakter siłownika zapewnia teoretycznie zerowy błąd statyczny. Duże wzmocnienie w torze głównym poprawia nadążanie układu za zmianami wzorca, ale zmniejsza zapas stabilności. Sytuację można poprawić wprowadzając korektor, regulator proporcjonalno-różniczkujący (PD).
Serwomechanizmy są powszechnie stosowane w przemyśle, np. w maszynach działających automatycznie.
Serwomechanizmem nazywamy układ automatycznej regulacji, w którym wielkością zadaną jest liniowe lub kątowe przesunięcie mechaniczne.
Serwomechanizmy składają się z:
- Serwo wzmacniacza, który zasila silnik elektryczny
- Serwo silnika wyposażonego w enkoder
- Układu wejściowego/wyjściowego do odbioru sygnałów zadających i sterujących
Proces pozycjonowania osi to taki sposób sterowania osią, aby przyjmowała ona ściśle określone pozycje wg zadanych parametrów ruchu, takich jak prędkość, przyśpieszenie, szarpnięcie. Ruch obrotowy osi, napędzanej przez silnik serwonapędu, może być wykorzystany do napędzania mechanizmów obrotowych lub może zostać zamieniony np. za pomocą śruby pociągowej, na ruch liniowy.
Serwomechanizmy stosujemy:
- Kiedy istotne jest zapewnienie właściwych pozycji przyjmowanych przez mechanizmy,
- Kiedy zależy nam na ruchu szybkim i precyzyjnym, utrzymaniu stałego naprężenia rozwijanego lub zwijanego materiału, wierceniu, dokręcaniu śrub z określonym momentem itp.

{kind=link}
Podstawowe rodzaje regulacji serwomechanizmów:
- Regulacja położenia ze sprzężeniem od położenia
- Regulacja prędkości ze sprzężeniem od prędkości
- Regulacja momentu obrotowego ze sprzężeniem prądowym
Podstawowe tryby pracy serwomechanizmów
- regulowanie położenia (pozycjonowanie),
- regulowanie prędkości obrotowej,
- regulowanie momentu obrotowego,
Wiele enkoderów wyposażonych jest w możliwość zmiany trybu regulacji, tj. tryb pracy z przełączeniem pomiędzy regulacją położenia/prędkości, prędkości/momentu, momentu/położenia.
Tryb regulacji położenia „P”:
Prędkość i kierunek obrotów silnika są zadawane z zewnątrz, np. ciągiem impulsów, co wraz z połączeniem z enkoderami o wysokiej rozdzielczości zapewnia niezwykle precyzyjne pozycjonowanie wału.
Tryb regulacji prędkości „S”:
Prędkość obrotowa serwosilnika jest zadawana zewnętrznym sygnałem analogowym lub cyfrowym z zaprogramowanymi wartościami parametrów. Kierunek obrotów zadawany jest zewnętrznym sygnałem dwustanowym lub znakiem analogowego sygnały zadawania prędkości
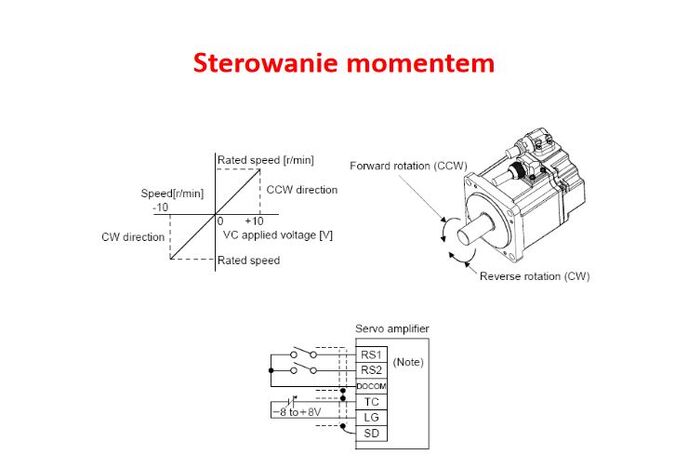
Tryb regulacji momentu „T”:
Wartość generowanego przez serwosilnik momentu obrotowego jest zadawana zewnętrznym sygnałem analogowym lub zaprogramowanymi wartościami parametrów. Kierunek momentu zadawany jest zewnętrznym sygnałem dwustanowym lub znakiem analogowego sygnału zadawania momentu.

{kind=link}

{kind=link}

{kind=link}
ENKODERY
Rodzaje enkoderów:
- Enkoder inkrementalny
- Enkoder absolutny
- Enkoder liniowy
Enkoder absolutny
– Impulsator, który przyporządkowuje odpowiednim wartościom kąta, kodowane wartości liczbowe.
- Na wałku napędowym znajduje się tarcza kodowa, która pozwala na zadawanie wartości absolutnych położenia w dowolnym momencie, bez konieczności porównywania z punktem odniesienia.
- Pozwala uzyskać informację o pozycji wału silnika po ponownym uruchomieniu, gdy zanikło napięcie zasilania
- Dostępne są dwa rodzaje enkoderów absolutnych: jednoobrotowe i wieloobrotowe. W enkoderze jednoobrotowym dzielony jest jeden obrót wału na odpowiednią liczbę korków i pomiar wielkości powtarza się po jednym obrocie. W enkoderze wieloobrotowym pomiar wielkości jest wynikiem pozycji kątowej i liczby obrotów wału.
- Informacja o pozycji przekazywana jest do modułu pozycjonującego w formie cyfrowej, a nie np. w postaci dwóch przesuniętych sygnałów A i B.
- W przypadku wystąpienia zakłócenia, informacja cyfrowa o aktualnej pozycji zostanie ponownie wysłana do modułu, tak więc ewentualne zakłócenia nie pogorszą procesu sterowania osiami.
- Kod Gray’a ma jedną ogromną zaletę – kolejne liczby różnią się zawsze tylko jednym bitem. Eliminuje to możliwość odczytania błędnych pozycji pośrednich.


{kind=link}
Enkoder inkrementalny:
- Impulsator, który zlicza impulsy (przyrosty kątowe) odpowiadające ruchowi obrotowemu.
- Charakterystyczną cechą tych urządzeń jest stała, niezmienna ilość impulsów na wyjściu np. 1024 imp/obrót., odpowiadająca rozdzielczości systemu pomiarowego.
- Do kontroli kierunku, drugi sygnał w kolejności jest przesunięty fazowo o 90 st. Licznik zewnętrznego systemu kontroli może być ponownie ustawiany dodatkowym zerowym impulsem,
- Pomiar położenia następuje niezależnie od rozdzielczości wyjściowej enkodera, oznacza to, że każda rozdzielczość, od 1 do 32768 impulsów na obrót, może zostać uzyskana na podstawie mechanicznego ruchu obrotowego i jego zamiana na sygnał elektryczny jest zasadnicza dla niezawodnego działania w pozycjonowaniu i CNC.


{kind=link}
SERWOSILNIKI, SERWOMOTORY
Stosuje się silniki prądu stałego i przemiennego:
- Silnik prądu stałego
- Silnik krokowy (skokowy)
- Silnik prądu stałego z magnesami trwałymi
- Silnik prądu stałego bezszczotkowy (brushless motor)
- Silnik asynchroniczny dwufazowy
- Silnik asynchroniczny trójfazowy
- Silnik synchroniczny trójfazowy
SERWOSTEROWNIKI
Zazwyczaj są to specjalizowane urządzenia do sterowania serwosilnikami, które umożliwiają regulację prędkości oraz położenia kątowego wału silnika. W układzie serwonapędu zadaniem sterownika pracującego w zamkniętej pętli sprzężenia zwrotnego jest, na podstawie danych z enkodera, takie sterowanie silnikiem napędowy, aby uzyskać założony skutek, np. obrót wału silnika o określony kąt.
Serwosterowniki są układami cyfrowymi ale umożliwiają sterowanie analogowe z poziomu listwy zaciskowej przez wejścia/wyjścia analogowe. W trybie analogowym mogą pracować jako automatyczne regulatory ruchu realizując proste zadania. Pełne możliwości funkcjonalne serwosterowników mogą być wykorzystywane dopiero przy sterowaniu cyfrowym przy pomocy zainstalowanego mikrokontrolera pozwalającego na uzyskanie czasów próbkowaniu rzędu kilkudziesięciu mikrosekund oraz zamknięcia wewnętrznej pętli pozycjonowania w czasie rzędu kilku mikrosekund.
Współcześnie są wyposażane w interfejsy komunikacyjne RS232, które umożliwiają szybką komunikację z jednostką nadrzędną lub wymianę informacji pozwalającą na synchroniczną prace wielu serwosilników.